|
Rune Engine
Version 0.2.7-alpha
Documentation for how to make games using the Rune Engine.
|
|
Rune Engine
Version 0.2.7-alpha
Documentation for how to make games using the Rune Engine.
|
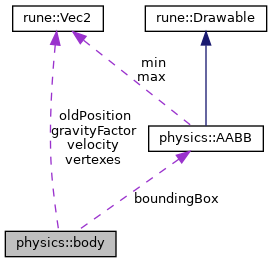
Rigid body struct containing all the information for a physically realistic response. More...
#include <rigidBody.h>
Public Attributes | |
| rune::Vec2 | vertexes [4] |
| Vertices of the body. | |
| AABB | boundingBox |
| Broad phase Minimum bounding box. | |
| double | xPos |
| X position in world coordinates. | |
| double | yPos |
| Y Position in world coordinates. | |
| rune::Vec2 | oldPosition |
| Previous position in world coordinates. | |
| rune::Vec2 | velocity |
| Velocity. | |
| double | invMass |
| 1/mass of the object | |
| rune::Vec2 | gravityFactor |
| How much gravity does this object have. | |
| double | restitution |
| How bouncy, between 0 and 1. | |
| double | staticFriction |
| Coefficient of static friction. | |
| double | dynamicFriction |
| Coefficient of dynamic friction. | |
| double | angleOfRotation |
| Coefficient of dynamic friction. | |
| double | angularVelocity |
| Rate of change of rotation. | |
| double | torque |
| Rotational torque on the object. | |
| double | invInertia |
| Inverse inertia of the body. | |
| double | rotationalRadius |
| Largest radius that can have a moment applied to it. | |
Rigid body struct containing all the information for a physically realistic response.
 1.8.18.
1.8.18.